Als je eens een project wil maken waar je de Arduino UNO echt wil uitdagen en ook jezelf, dan moet je zeker eens proberen er een drone mee te bouwen 🙂

Hoe begin je aan zo’n project?
Ik heb eerst mijn studenten in de klas eens aan het werk gezet tijdens een drone STEM project van STEM@school van de KU Leuven. Hier kan je veel achtergrond info downloaden voor jouw STEM les.
Tijdens deze STEM opdracht hebben we dit project in stukken gehakt en zijn we de verschillende onderdelen van de drone beter gaan bestuderen. Pas op het einde zal er een vliegende drone uit voortvloeien. Dit omdat het een vrij complexe opdracht is. Dus even geduld voor je er mee klaar bent 🙂
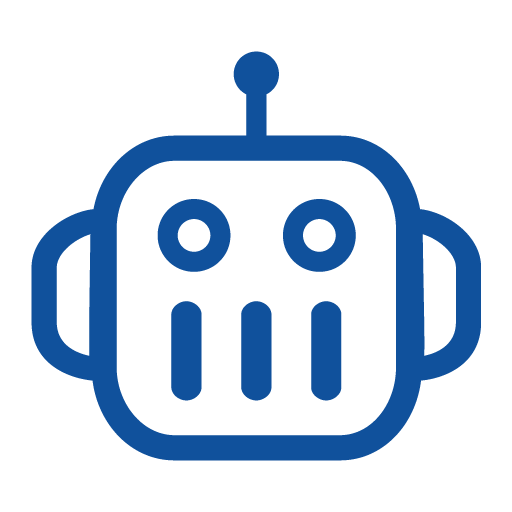
Stap 1: wat moet ik aanschaffen nadat ik het blokschema heb bestudeert?
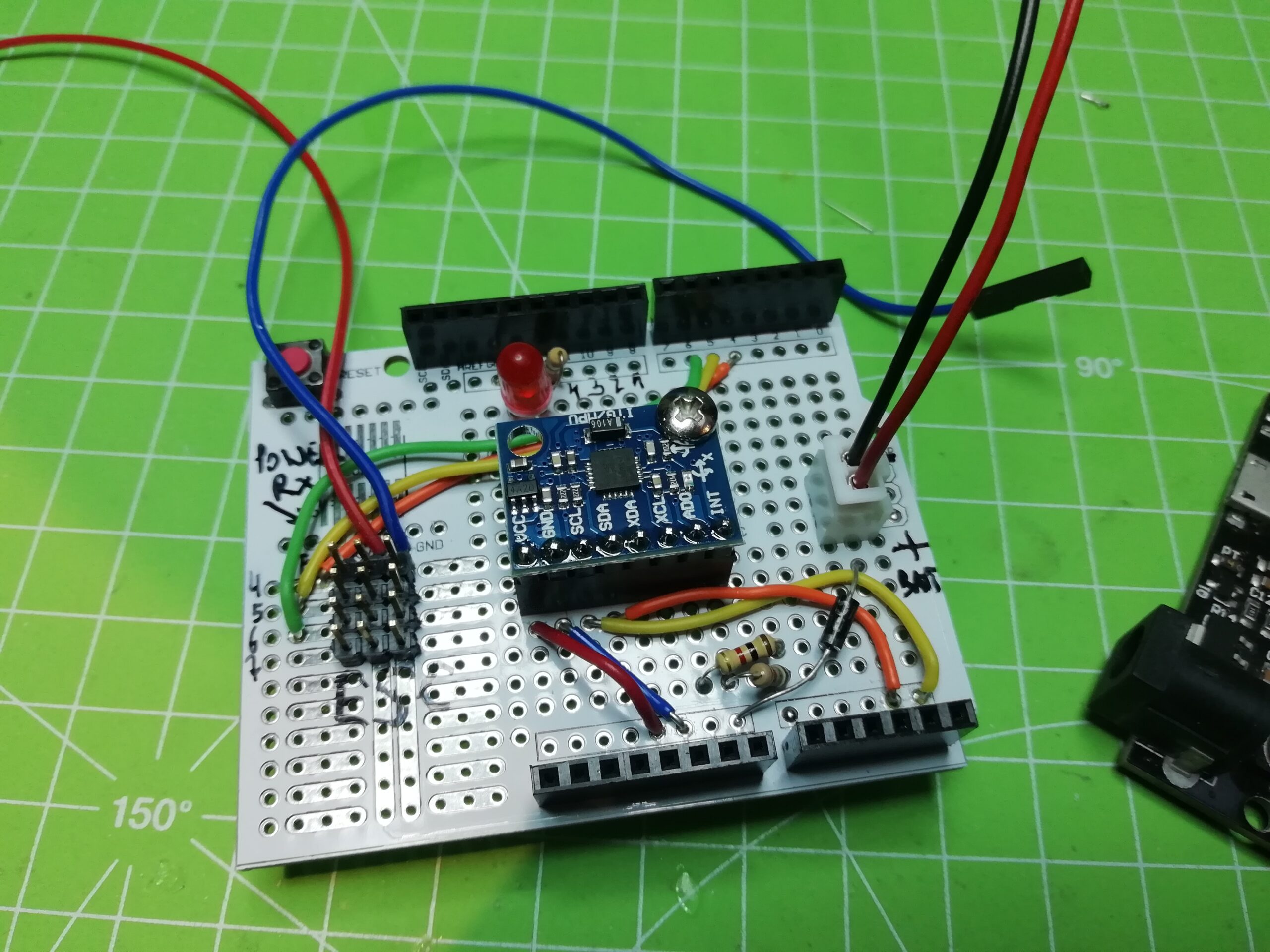
We hebben buiten de UNO een hand vol algemene componenten nodig. Die zijn vooral voor de veiligheid van de batterijspanning te garanderen. De LED helpt ons te vertellen in welke toestand de drone zich bevind.
Alle info en details van de werking kan je in youtube filmpjes netjes terugvinden op de site van Joop Brokking.
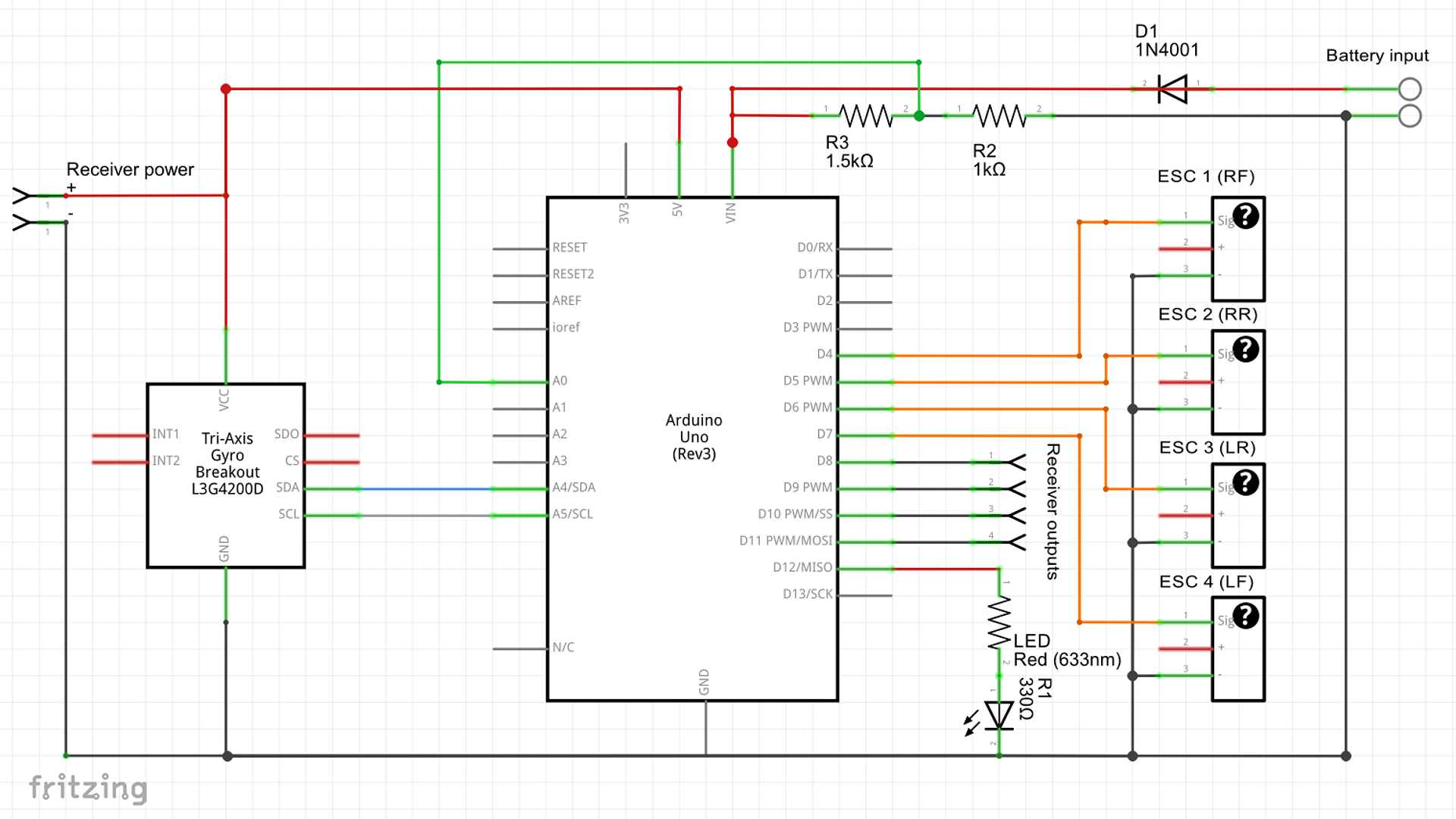
Buiten de losse componenten hebben een gyroscope nodig. Ik heb de GY521 met zijn I2C interface gebruikt. Over deze gyroscope is er heel veel info op het web te vinden. Je kan een leuke opstelling maken met enkel de gyroscope en het programma Processing.
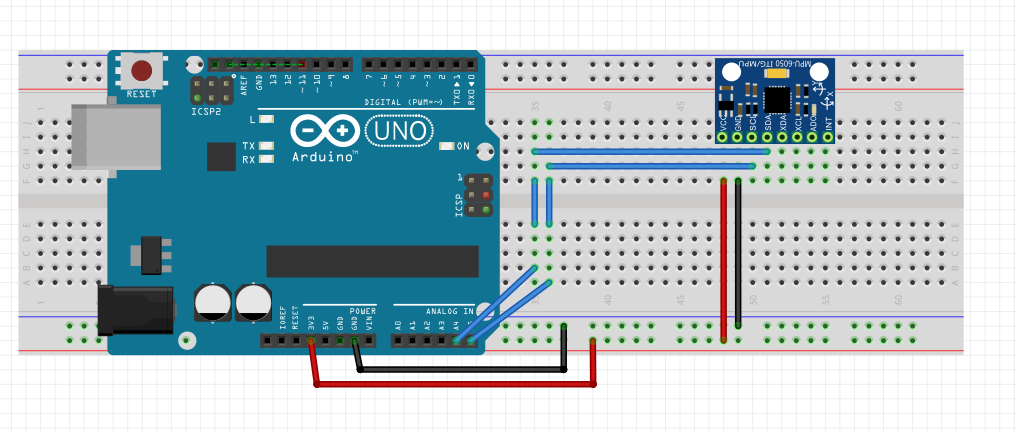
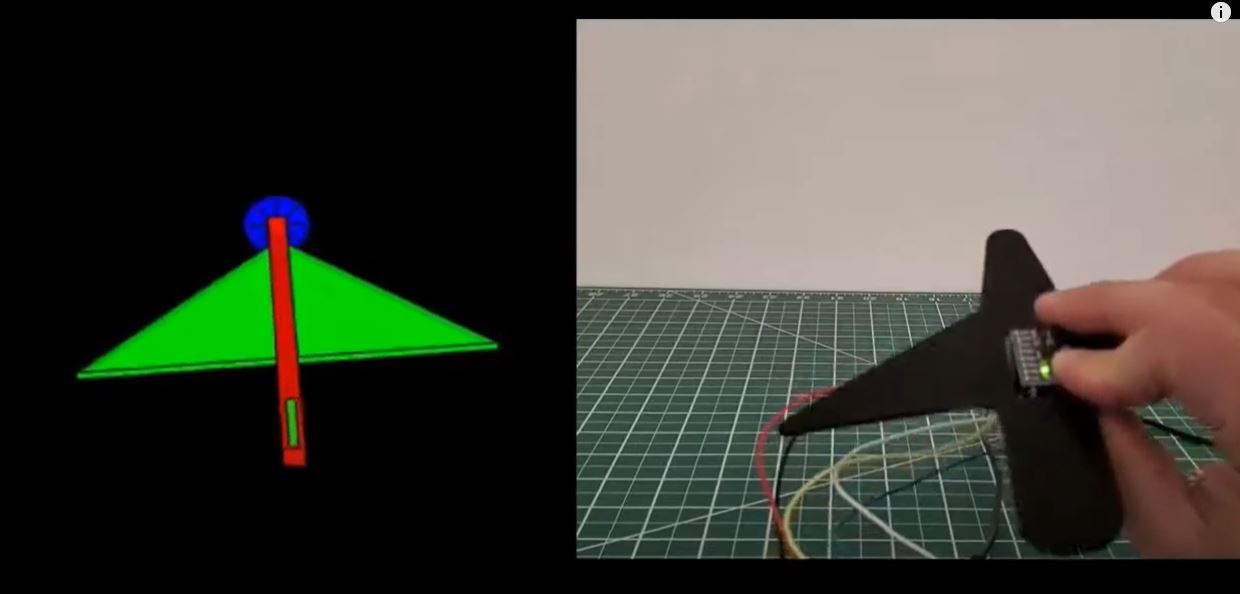
In de filmpjes van Joop Brokking ga je, na de bouw van de drone, deze gyroscope leren calibreren.
Let op dat je altijd deze testen doet zonder de propellers te monteren ! Testen doe je achter plexiglas of op voldoende afstand in de buiten van de drone. Ik kan er van meespreken dat wanneer een drone propeller op volle toeren in je hand hakt best pijn kan doen.
Ik heb ook met de studenten de RF module apart bestudeert. In plaats van de drone zender en ontvanger stuk te doen en hiermee te experimenteren hebben we een Arduino opstelling gemaakt met de RF ontvanger op 433MHz. Deze is goed verkrijgbaar bij Ali.

Zowel op de website van Jos Verstraten als op instructables kan je over deze RF module veel bijleren.
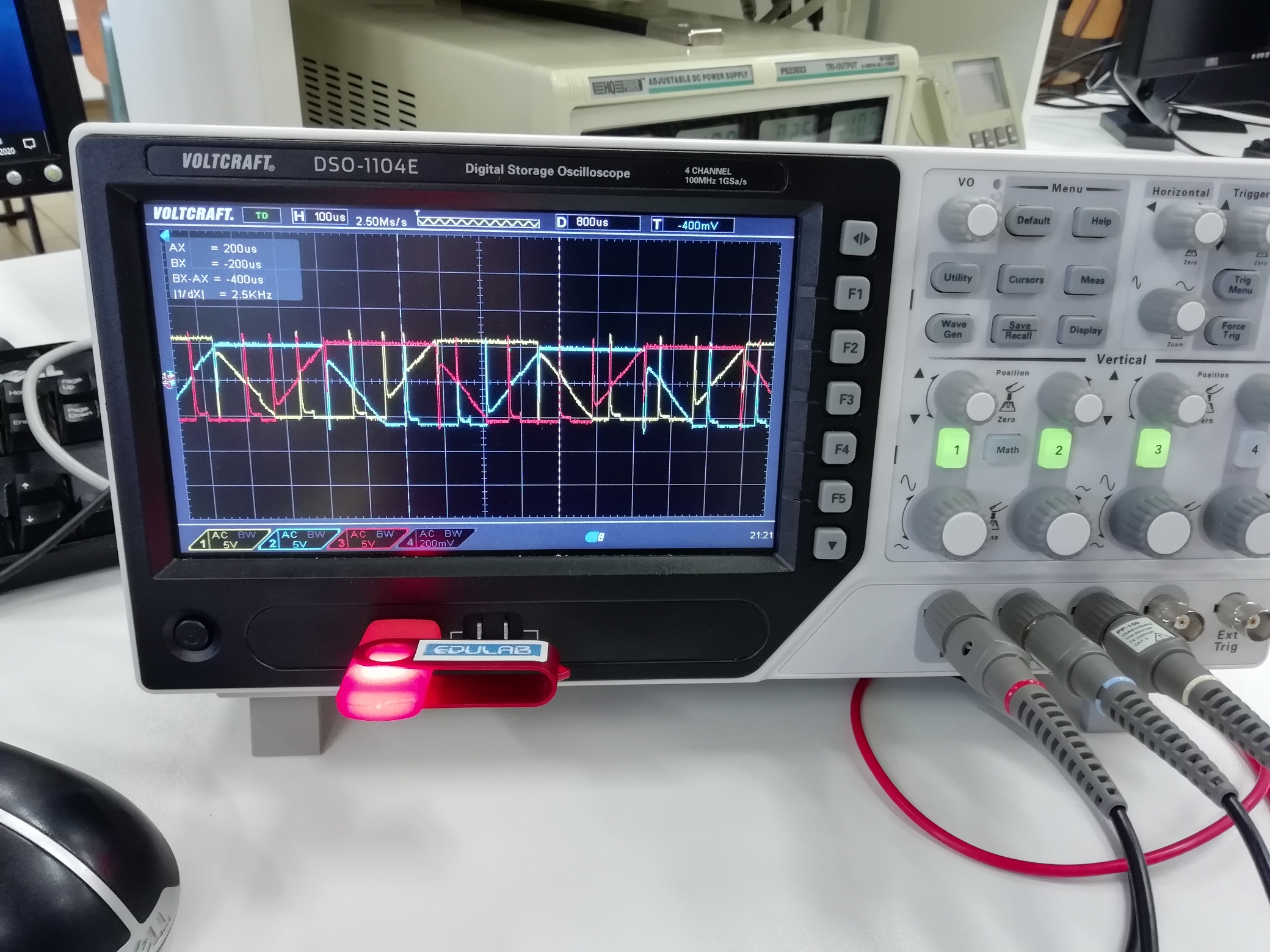
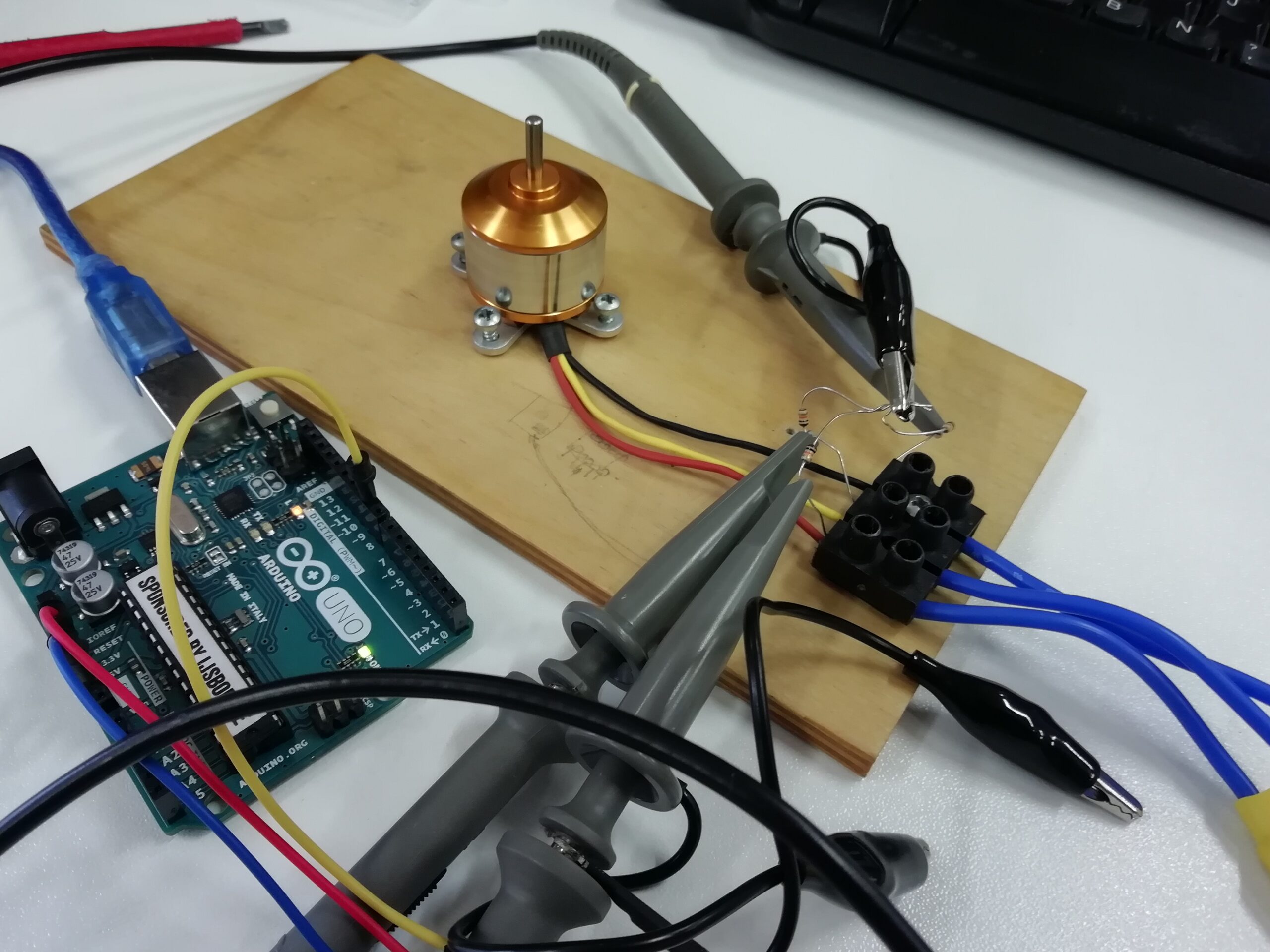
De ESC modules hebben we eveneens getest met 1 brushless motor op een plankje. Je kan er ook knappe 3-fase metingen mee doen met de digitale geheugenscope.
Als chassis heb ik een F450 doe het zelf kit gebruikt. Deze kan je op Ali maar ook bij hobbyking vinden.

De filmpjes van Joop Brokking geven goede uitleg over de montage van bouw van de drone.
Als laatste moet je dan nog op zoek naar een goede Lipo batterij en een Transceiver voor de aansturing van de drone. Ik heb een standaard batterij van 5500mAh type S3 gebruikt. Je kan leuke testen op deze batterijen doen, geïnspireerd door de mensen van IMEC, meer specifiek de Brightlab organisatie. Bij hen kan je verschillende workshops rond drones en STEM experimenten volgen. Zeker de moeite waard.

De FLYSKY heb ik gebruikt als transceiver om de drone aan te sturen. Dit is een goedkopere oplossing dan de Tournigy versie. Info over de instelling en binding vind je zeker op youtube.

Nadat je alle hardware hebt verbonden met elkaar en gesoldeerd kan je de 3 Arduino programma’s van Joop Brokking doorlopen. Zo ga je dan een setup, calibratie en uiteindelijk een flightcontroller programma gebruiken.

Als je graag het hele project nog eens wil nalezen dan heb ik hier de eindwerkboek van mijn student. Die mag je naar believen gebruiken. Je kan er maar van leren.
Veel succes met dit project. Hopelijk heb je op deze manier al heel wat inspiratie op gedaan 🙂