
Nadat je de basis onder de knie hebt van Arduino kan je starten met de meer uitgebreide projecten.
Onder het hoofdstuk Arduino gevorderden kan je allerlei info terugvinden. Van een UNO PCB print zelf solderen en een eigen Arduino robot solderen en monteren tot allerlei testen op sensoren. Ook verschillende communicatie protocollen komen aanbod zoals I2C, USB, RS232 en vele draadloze technieken. Veel te ontdekken dus!
Met al deze tips kan je dan je eigen project proberen vorm te geven.
Er is ook een cool project toegevoegd waarbij we een robotarm gaan bouwen met stappenmotoren.
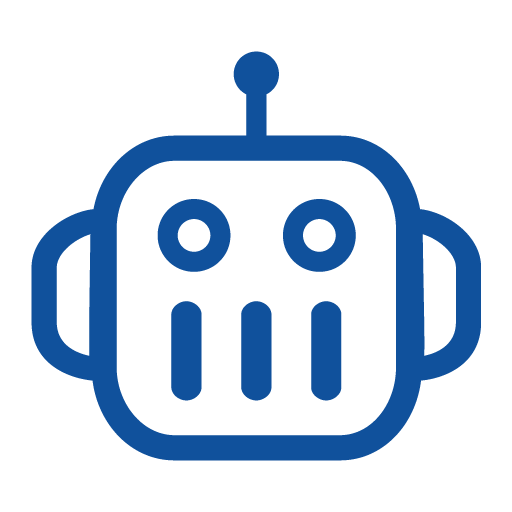
Arduino UNO PCB solderen
Deze zelfgemaakte Arduino UNO PCB door EDULAB is een ideaal startpunt voor zij die dieper willen duiken in de Arduino wereld. Zo leer je ook wat de UNO omgeving uiteindelijk bevat en hoe je deze eventueel in andere projecten of op andere PCB’s makkelijk kan integreren.
De volgende files geven een goed beeld van hoe je de PCB kan maken, er mee aan de slag kan gaan en hoe je deze ook in een workshop kan gebruiken. Je leert er ook hoe je de UNO kan programmeren en de eerste uitvoeren.
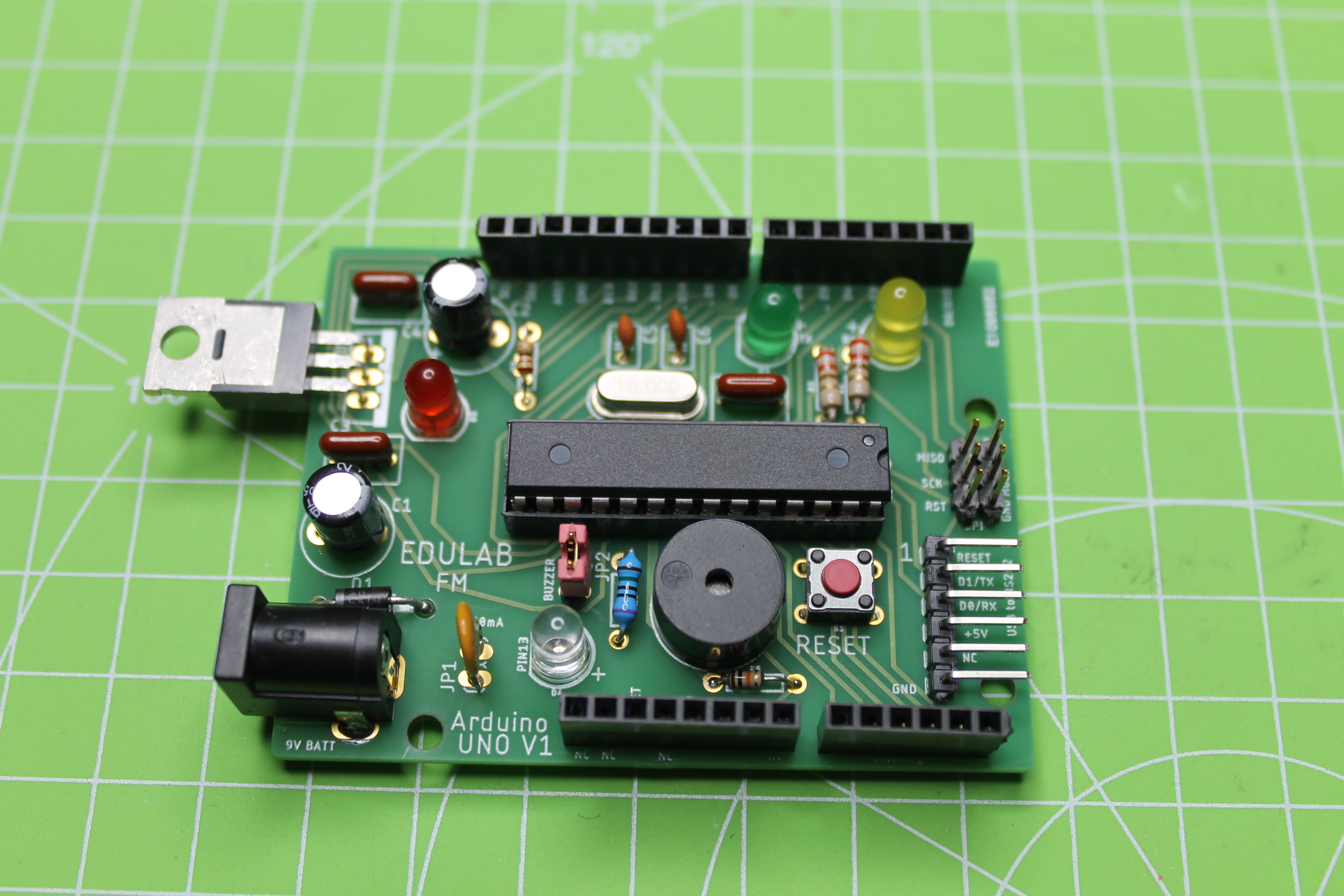
Arduino Microardubot solderen en monteren
Nadat je de UNO PCB klaar hebt kan je een volgende stap zetten. Monteer de UNO op het chassis van een wagentje en je kan weer heel wat experimenten uitvoeren. Hierbij zijn ook een deel basis oefeningen voorzien (zie in het basis document). In dit geval moeten we met losse draadjes aan de slag en moet je elke component goed beheersen.
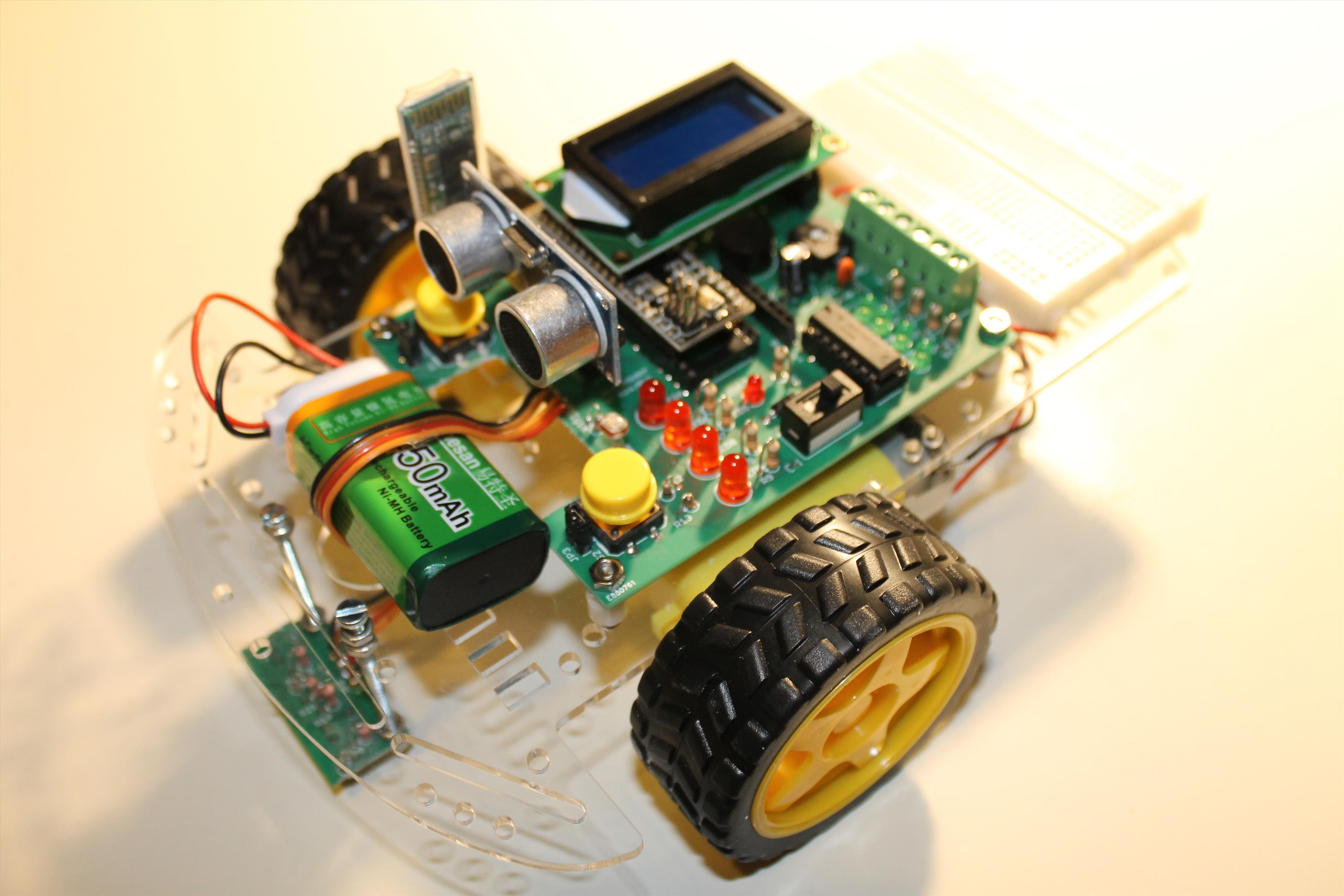
Anderzijds kan je ook een volledige eigen PCB solderen met een Micro Arduino erop en alle rand componenten. Dan moet je vooral focussen op het programmeerwerk. Dus even kijken welk niveau je wil bereiken. EDULAB bouwde zo ook zijn eigen robotjes en deed hier tal van workshops mee.
Arduino gevorderden oefeningen
Wanneer je begrijpt hoe de UNO werkt en je hebt de basis onder de knie, dan moet je zeker eens starten met de gevorderden cursussen. Vele sensoren en communicatie technieken komen hier aanbod. Voor ieder wat wils.
Zie voor deze cursussen bij documentatie.
Arduino gestuurde robotarm MKII
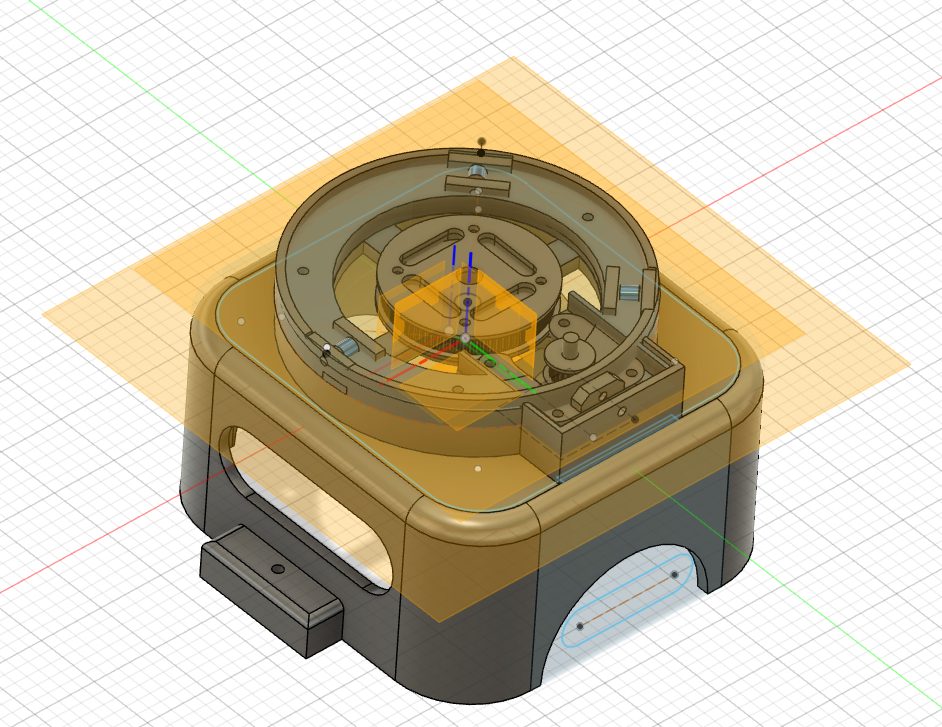
Er werd ons gevraagd om een robotarm te maken voor de BITL wedstrijd (Bring innovation to live) van RTC Antwerpen met leerlingen. Waar begin je dan? Na heel wat onderzoek heb ik eerst gekozen om zelf meer ervaring met 3D printen en robots op te doen. Zo bouwde ik, volledig van scratch, een onderdeel (wordt vervolgd) van een NIRYO robot.
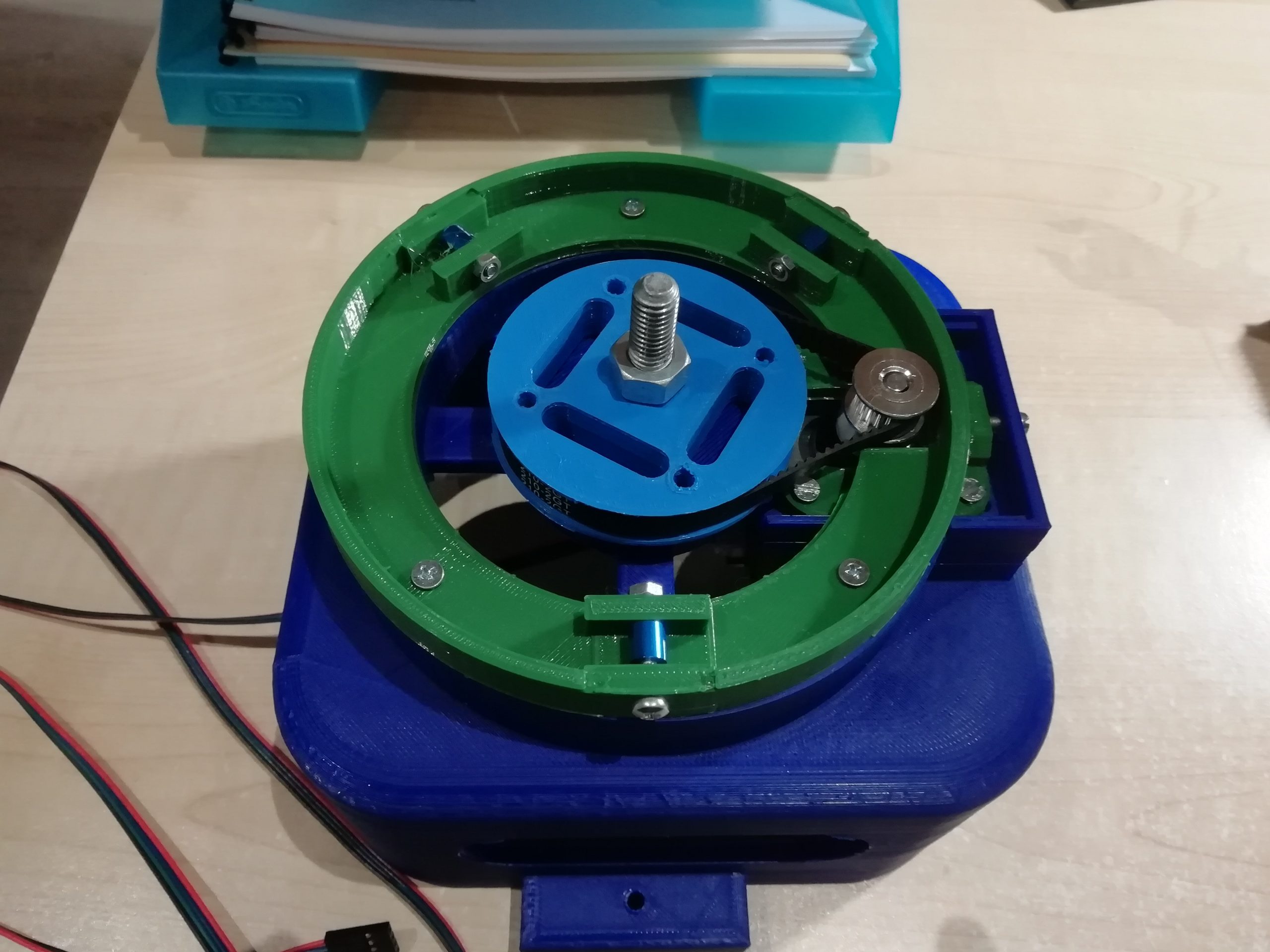
Ik leerde vooral hoe ik met Fusion 360 verschillende onderdelen (componenten) kon samen tekenen in 1 geheel. Er hoort zelfs een opspan mechanisme bij om de riem aan te trekken. Het tandwiel is eveneens van nul getekend.
Daarna was het tijd om een robot voor de studenten voor te bereiden. Want de Nyrio zou teveel tijd in beslag nemen. Uiteindelijk kwam ik uit bij de MKII. Hiervan waren de STL files reeds beschikbaar op internet en een youtube filmpje. Ik heb alles geprint en heb de mechaniek in elkaar gestoken. Hier en daar moest er wel wat aangepast of hertekend worden.
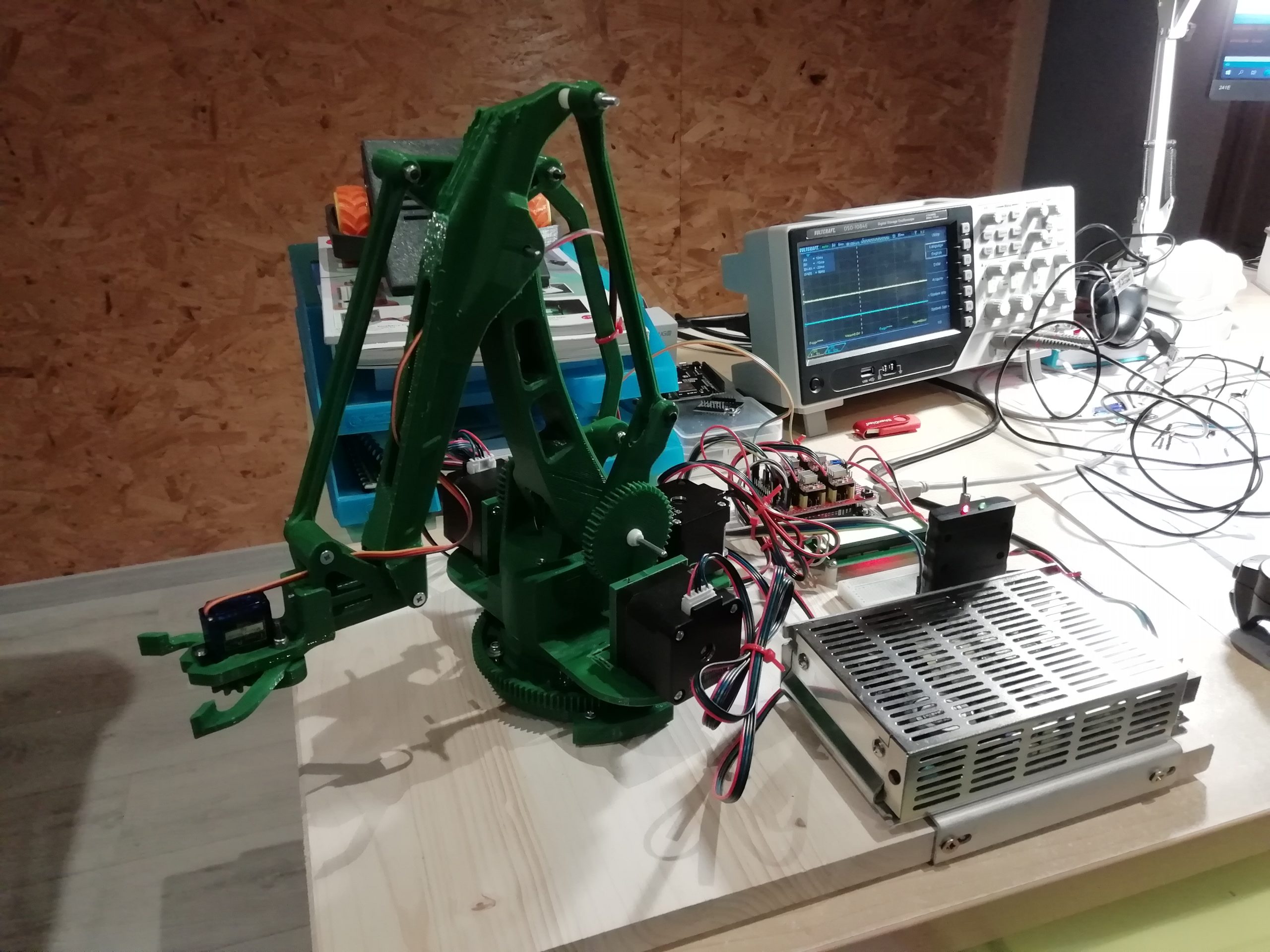
Een aparte voeding levert 10V voor de stappenmotoren shield en de arduino. Een PS2 controller, gestuurd via Arduino, zorgt ervoor dat we de robot draadloos kunnen bedienen.


Ik heb enkele metingen met de stroomtang gedaan om te achterhalen welk microstep signaal er naar de stappenmotoren werd gestuurd. Zo kon ik beter de signalen begrijpen van de motorshield. Merk op dat je eerst de motordrivers moet afstellen (potentiometer op de DRV8825 drivers afregelen) om zo de maximum stroom te bepalen voor de motoren. Te weinig stroom zorgt er wel voor dat de stappenmotor niet eens opstart. Dus goed afregelen!

DRV8825 met aanduidingen waar je wel met een voltmeter kan meten. Meer info vind je zeker op internet.
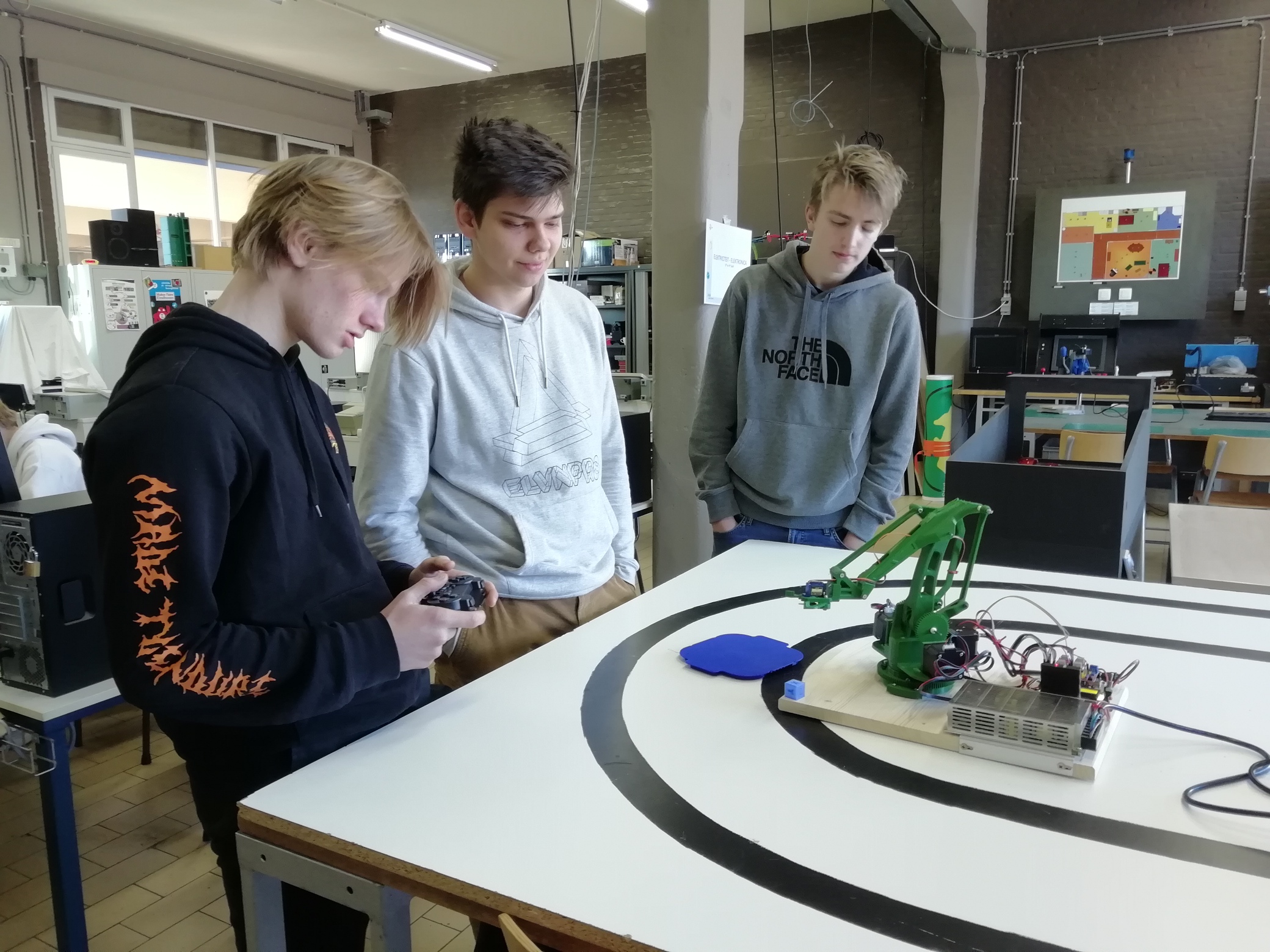
Studenten testen zelf de robot uit alvorens er eentje te gaan bouwen. Hun extra doel is de grijper aan te passen zodat deze een container kan oplichten en verplaatsen.
Om de stappenmotoren te leren aansturen hebben we gebruik gemaakt van een stappenmotor testkit. Deze is ontworpen (3D geprint) door iemand van RTC Antwerpen.

Zelf heb ik deze stappenmotor testkit gefinaliseerd. Zo kunnen de studenten nu reeds testen op de motoren en shield doen terwijl de robot nog mechanisch in elkaar wordt gezet.
Het filmpje geeft een mooi resultaat weer van de werking van de totale robot.
